-

深圳市英诺伺服技术有限公司
主营:直线电机,平板直线电机,磁栅编码器,磁栅 - 18138237348

深圳市英诺伺服技术有限公司
主营:直线电机,平板直线电机,磁栅编码器,磁栅 8
8
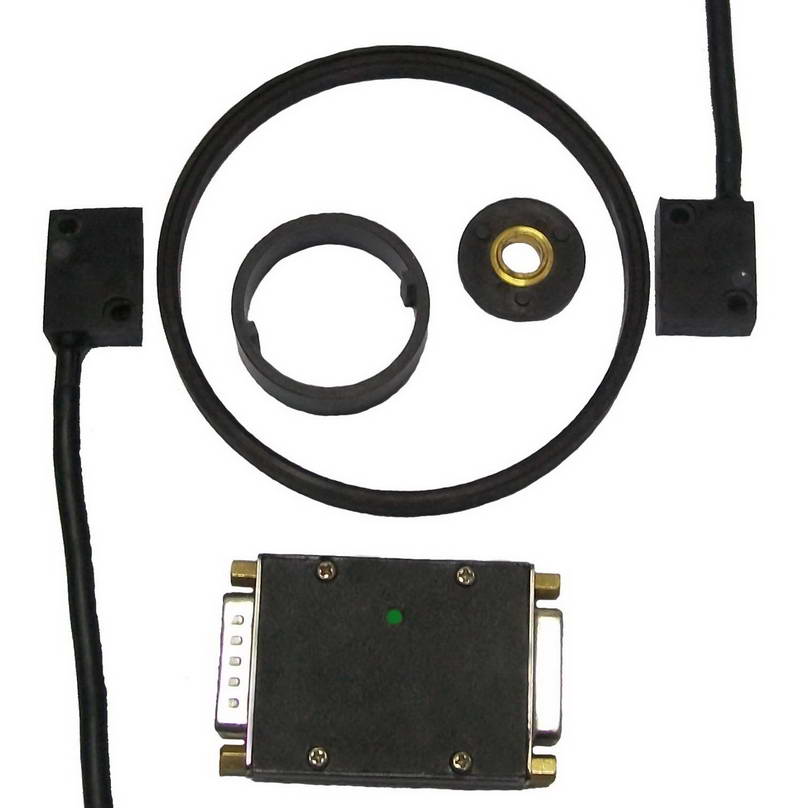
● 非接触敞开式磁电系统 ● **小型对径多读数头 ● **强的抗污能力 ● 读数头重量轻(<10g) ● 可以消除接缝误差 ● 单周期分辨率较高可达16位 ● 集成 Set-up LED ● 工业标准数字和模拟输出可选 ● 特种规格磁环可按照客户要求定制 英诺伺服maglin系列高精度圆磁栅角位移传感器是一套非接触敞开式高精度磁栅编码器系统,用来做精确的角位移反馈。系统采用特殊磁性磁环作为系统的标尺,即使在大于1mm的安装间隙下依然可以实现精确测量。该系统采用对径多读数头设计,可以有效的消除系统磁环安装的偏心误差,特殊的磁传感阵列设计能够有效抑制转轴振动造成端面跳动引起的测量误差。同时先进的信号微处理器设计使该系统能够有效减弱或消除特种磁环的接缝误差。尤其是在大直径、高污染环境,比如高精度伺服转台、航天模拟、炮弹射击瞄准系统等传统圆光栅或者圆磁栅无法解决的地方,该系统能够**实现精确角位移测量。 本系统能够输出符合工业标准的数字增量方波信号或者模拟正余弦信号以供不同接口标准的客户选用。*特、简洁的设计使Maglin系列高精度圆磁栅角位移测量系统有比传统角位移编码器更加**的性能和更好的稳定性。 多读数头处理器内置的Set-up LED可以使客户更加快捷方便的安装此系列圆磁栅,并能够通过LED的颜色来及时的进行系统故障的检测和排除(正常工作时为绿色,信号出错时为红色)。 Maglin系列高精度圆磁栅角位移测量系统能够广泛的应用于高精度数控数显加工系统、自动化设备、大直径伺服转台、经纬仪、高精度测角仪、扭矩传感器、地震波探测仪、陀螺仪、传动链动态精度测量仪、丝杠动态精度测量仪、航天模拟、炮弹射击瞄准系统、*雷达阵列等各种非常规客制化测量环境。 安装尺寸: 分辨率: 型号 分辨率 插补系数 较高运行速度 MagRA 491520 8192 400rpm MagRB 245760 4096 800rpm MagRC 122880 2048 2000rpm MagRD 61440 1024 4000rpm MagRE 30720 512 7000rpm MagRF 15360 256 8000rpm MagRG 7680 128 8000rpm MagRH 3840 64 8000rpm MagRI 1920 32 8000rpm MagRJ 960 16 8000rpm MagRK 480 8 8000rpm MagRL 240 4 8000rpm MagRM 120000 2000 2000rpm MagRN 96000 1600 3000rpm MagRO 60000 1000 4000rpm MagRP 48000 800 4500rpm MagR 500 4500rpm MagRR 24000 400 4500rpm MagRS 19200 320 4500rpm MagRT 12000 200 4500rpm MagRU 9600 160 4500rpm MagRV 6000 100 4500rpm MagRW 4800 80 4500rpm MagRS 2400 40 4500rpm 注:本表格适用于Maglin标准系列磁环,特殊尺寸和分辨率解决方案请致电本公司。 安装方法: 1、 先将磁环或者磁尺通过粘接剂固定在转盘的外圆周或者内圆周上,并尽量保证环平面与转台平面的平行; 2、 让转台持续恒速转动; 3、 将读数头A放在磁环检测面上方,并实时观测多头处理器Set-up LED的颜色,当读数头A移动到亮红灯和亮绿灯的临界点时,将读数头A向靠近磁环检测面的方向做少许移动,然后固定,以保证 Set-up LED的颜色始终是绿色; 4、 接下来读数头B放在与读数头A距离磁环检测面对径等距的方向,并沿着磁环检测面做顺时针或者逆时针方向的微位移,当多头处理器Set-up LED的颜色由红变绿时,说明**个读数头A与*二个读数头B的相位已经校准,此时将*二个读数头B的位置做基本的固定。 5、 将已经做好对径相位校准的读数头,沿着半径方向向磁环检测面移动,按照安装尺寸建议的与磁环检测面距离(建议0.8mm)固定,以保证较佳的测量精度; 6、 将读数头固定螺丝用螺纹固持胶锁定以防止振动引起的松动,或用环氧粘接剂(一次性*固定)滴在读数头和螺丝固定部位以保证可靠的对径相位和距磁环检测面的较佳距离,同时调整好各读数头的引线输出,并用对应的塑料卡子固定。 运行环境和电参数: 电源: 5V ±5%(24V可选) 功耗: <30mA(无负载) 温度: -10-80度 湿度: 10-90%相对湿度 防护等级:IP67(读数头) 加速度: 运行20G 电缆: 4.9mm加强屏蔽绕包**柔电缆,各种长度可以按照客户的具体要求定制